-
-
74
- 작성자서정원
- 작성일2022-05-31
- 4465
- 동영상동영상
-
-
72
- 작성자서정원
- 작성일2022-05-17
- 6728
- 동영상동영상
-
전자공학과 박성준 교수 연구진이 인공 소변에서 선택적으로 요오드를 검출할 수 있는 IGZO 기반의 바이오센서 개발에 성공했다. 소형화 및 뛰어난 휴대성으로 요오드의 현장진단 검사에서도 응용이 가능할 것으로 기대된다. 박성준 교수(사진 왼쪽)와 약학대학 김주희 교수(사진 오른쪽) 공동연구팀은 높은 선택성과 민감도를 기반으로 요오드를 검출할 수 있는 IGZO 기반의 바이오센서 개발에 성공했다고 밝혔다. 관련 연구는 ‘요오드의 정량분석과 신속 검출을 위한 IGZO 기반 전해질 박막트랜지스터(Quantitative and Rapid Detection of Iodide ion via Electrolyte-Gated IGZO Thin-film Transistors)’라는 제목으로 국제 학술지인 <센서스 앤 액츄에이터 비: 케미칼(Sensors and Actuators B: Chemical)> 11월27일자 온라인판에 게재되었다. 이번 연구는 아주대학교 약학과 석박사과정 황철진 학생이 제1저자로, 전자공학과 석사과정 곽태현 학생과 가천대학교 전자공학과 김창현 교수가 공동 저자로 참여했다. 요오드는 내분비계의 필수적인 생물학적 음이온이나, 전 세계 인구의 약 29%는 체내 요오드 농도와 관련된 문제를 호소하고 있다. 임산부에게 요오드가 부족할 경우, 갑상선 기능 저하증으로 이어져 태아의 신경 인지능력 발달에 부정적 영향을 미치며, 요오드를 과다 섭취할 경우에는 자가면역 갑상선염과 같은 갑상선 기능 장애를 유발한다. 따라서 산모와 태아의 건강을 위해서는 적절한 체내 요오드 농도 유지가 필수적이다. 이전까지 소변에서 요오드 농도를 측정하는 방식은 소변 내의 다른 이온 및 특정 물질들의 간섭과 요오드 자체의 농도가 낮아 어려움이 많았다. 이로 인해 플라스마 질량 분석법(ICP-MS), 해상도 질량 분석법(HR-MS) 등의 방법을 사용했으나, 이는 고가의 실험장비가 필요하며 준비부터 분석까지 많은 시간이 소요된다는 단점이 있었다. 이에 연구팀은 뛰어난 내구성을 지녔으며 대량생산에도 용이한 IGZO에 주목했다. IGZO는 인듐(In)·갈륨(Ga)·산화아연(ZnO)으로 구성된 비정질 반도체 물질로, 용액공정을 통해 대면적 및 대량생산이 쉬우며 우수한 전자이동도와 내구성을 지니고 있다. 이에 차세대 투명 디스플레이, 뉴로모픽 및 유해 바이오 물질 검출 센서 개발 등의 연구에 활용되고 있다. 연구팀은 요오드 이온에 의해 IGZO 금속산화물 채널로 구성된 바이오센서의 전류가 즉각적으로 변화하는 현상에 주목했다. 반도체와 전해질 계면에서 요오드의 산화 및 환원 반응에 의한 전류 변화를 분석해 인공 소변에서 요오드의 농도를 성공적으로 정량화한 것. 이를 바탕으로 세계보건기구(WHO)에서 제안한 학동기 아동 소변의 요오드 농도를 기준으로 실시간 및 연속적으로 요오드를 검출할 수 있는 바이오센서를 개발했다. 이번에 개발된 소자는 1마이크로미터(uM)의 요오드 농도까지 분석 가능한 민감도를 지니고 있다. 특히, 최대 0.1초 이하의 반응 속도를 보여주고 있어 기존 검사 장비에 비해 빠르고, 0.5V 이하의 저전압 구동이 가능해 소형화 및 휴대성이 증가했다. 또한 지속적인 산화 및 환원 반응을 거치면서도 요오드에 대한 민감도를 유지할 수 있어 향후 현장진단 검사에서도 응용가능하다. 박성준 교수는 “이번에 개발된 바이오센서는 요오드뿐만 아니라 다양한 생체 물질을 검출할 수 있는 핵심 센서 플랫폼 기술”이라며 “실시간 생체 모니터링 및 생체 물질 탐지 등 다양한 분야에서의 활용이 기대된다”고 전했다. 이어, “관련 연구가 지속된다면 각종 질병의 조기 진단, 위험 물질에 대한 안전성 확보 및 다양한 환경물질에 대한 검출이 가능할 것”이라고 밝혔다. 한편, 이번 연구는 한국전력공사 사외공모 기초연구, 한국연구재단 기초연구사업, 식품의약품안전처 민간식의약촉진지원사업의 지원으로 수행되었다.
-
70
- 작성자서정원
- 작성일2022-05-11
- 6605
- 동영상동영상
-
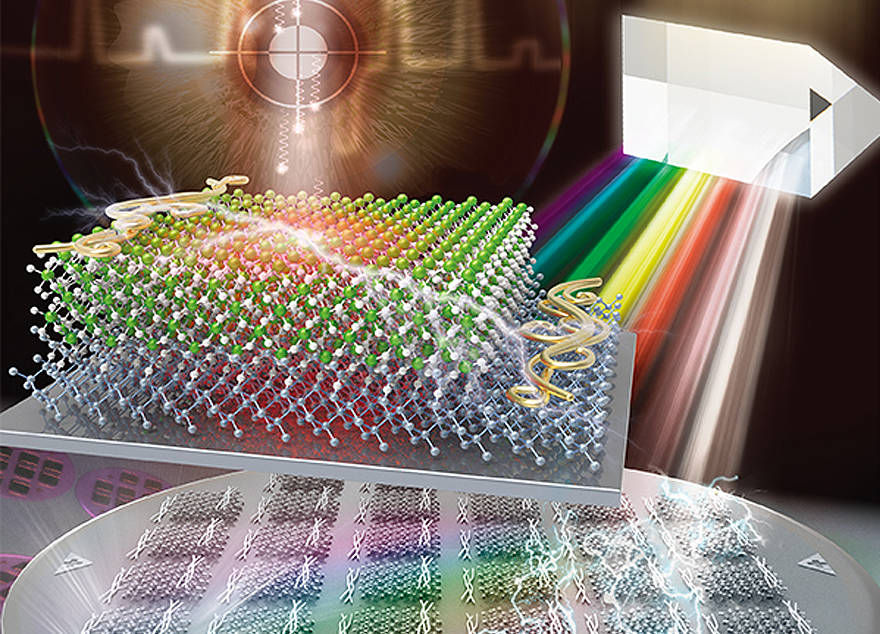
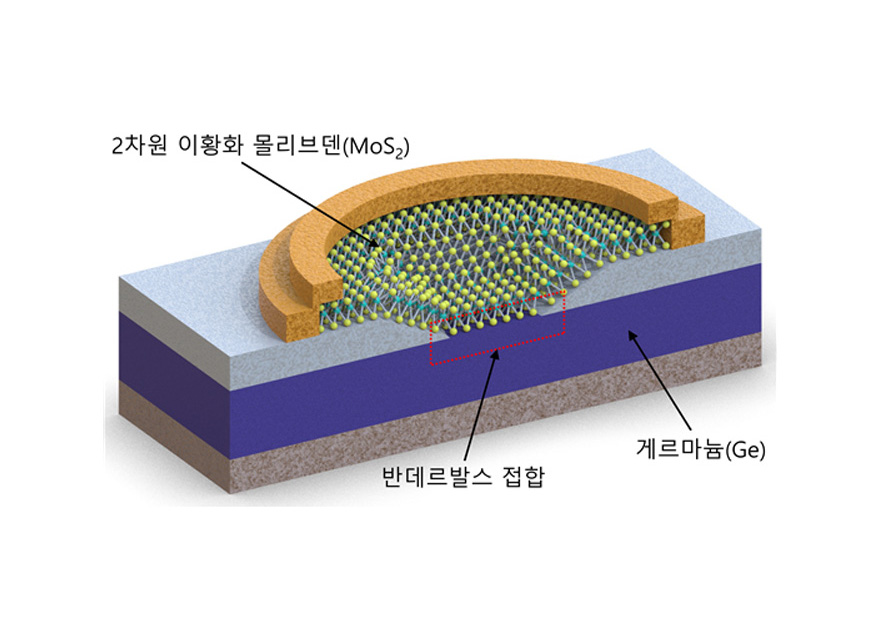
우리 학교 허준석 교수 연구팀이 하나의 센서로 눈에 보이는 가시광 이미지와 눈에 보이지 않는 적외선 이미지를 구분해서 획득할 수 있는 듀얼 광센서를 개발했다. 허준석 교수(전자공학과, 사진)는 숭실대학교 유건욱 교수, 미국 버지니아 공대 이규상 교수 연구팀과의 공동 연구를 통해 게르마늄‧이황화몰리브덴 기반의 새로운 이종접합 구조 광센서를 제안하고, 이를 통해 가시광선과 적외선을 실시간으로 선택적으로 검출하는 데 성공했다고 밝혔다. 논문 제목은 ‘Visible and infrared dual-band imaging via Ge/MoS2 van der Waals heterostructure’으로, 과학 분야 국제학술지인 <사이언스 어드밴시즈(Science Advances), IF: 14.136> 12월15일자 온라인판에 게재됐다. 이번 연구에는 아주대학교 석사과정 황어진 학생과 박영서 박사가 제1저자로 참여했다. 물체의 색깔 같은 가시광 이미지 뿐만 아니라 안개 같은 악천후나 야간에 유용한 적외선 이미지를 필요에 따라 선택적으로 얻는 것은 운전자 보조시스템이나 드론, 로봇 등 각종 비전 시스템의 중요한 이슈 가운데 하나다. 기존에도 시야가 어두워질 때를 대비한 가시광선‧적외선 동시검출 광센서가 연구되어 가시광부터 단파장 적외선까지 검출할 수 있는 다양한 소자들이 발표되었다. 그러나 이러한 소자들은 가시광/단파장 적외선에 구분 없이 모두 반응함으로써 가시광 이미지와 적외선 이미지가 혼재, 별도의 필터로 각 이미지를 구분해야 하는 번거로움이 있었다. 이에 연구팀은 별도 필터없이 전압 조절만으로 가시광 이미지와 적외선 이미지를 구분해 얻을 수 있는 독특한 에너지 밴드 구조의 광센서를 설계했다. 차세대 반도체 소재로 많은 주목을 받는 2차원 이황화 몰리브덴을 게르마늄(p-타입)과 반데르발스 이종 접합, 기존 격자 상수로 제한되는 반도체 물질 조합에서는 얻을 수 없는 독특한 에너지 밴드 구조를 구현한 것. 그 결과 전압 크기에 따라 전자와 정공의 흐름을 조절하고 파장 대역에 따라 암정류 및 광전류 증폭률을 다르게 조정함으로써 동작 전압에 따라 가시광선만 검출하거나 적외선만을 검출하는 광센서를 개발할 수 있었다. 연구팀은 개발된 소자를 이용해 가시광과 단파장 적외선에 대해 구분된 이미지를 확보하는 듀얼 밴드 이미징 실험을 실시했다. 실리콘 기판의 앞 뒤가 다른 패턴 ‘지킬 앤드 하이드’ 패턴을 놓고 앞에서는 가시광선을, 뒤에서는 적외선을 검출하도록 함으로써 각각 다른 두 가지 패턴의 이미지를 얻는 데 성공했다. 하나의 광센서로 가시광과 단파장 적외선을 구분해서 검출할 수 있는 기술은 기존 광센서에서는 찾아볼 수 없는 기능을 가진 신개념 소자로, 운전자 보조 시스템, 드론, 로봇 등 기계 비전 시스템에 다양하게 활용될 것으로 기대된다. 또한 학술적인 측면에서도 2차원 반데르발스 물질과 기존 반도체를 조합한 이종접합 구조를 기반으로 격자 길이에 제한된 이종접합 구조에서 벗어나 새로운 소자를 개발할 수 있는 가능성도 보여주었다. 허준석 교수는 “실제 적용을 위해 대면적 어레이 형태로의 확장과 대면적 2차원 소재에 직접 게르마늄 등의 반도체를 성장해 이종접합 구조를 구현하는 연구가 필요하다”고 설명했다. 한편 이번 연구는 과학기술정보통신부와 한국연구재단이 추진하는 차세대지능형반도체 기술개발사업의 지원으로 수행되었다.게르마늄/이황화몰리브덴 이종접합 광센서 모식도기존 반도체 이종 접합이 격자 길이에 제한되었던 점에서 벗어나 반데르발스 이종접합 구조를 통해 차별화된 광센서 구현이 가능했다.개발한 광센서를 이용한 가시광/적외선 듀얼 이미징앞뒤가 다른 ‘지킬앤드하이드’ 패턴을 이용해 가시광과 적외선을 선택적으로 검출할 수 있음을 검증하였다.앞에는 가시광선을 비추고 뒤에는 적외선을 비춘 상태에서 광센서의 동작모드를 제어해 두 가지 이미징 결과를 얻었다.
-
68
- 작성자서정원
- 작성일2022-04-13
- 5065
- 동영상동영상
-
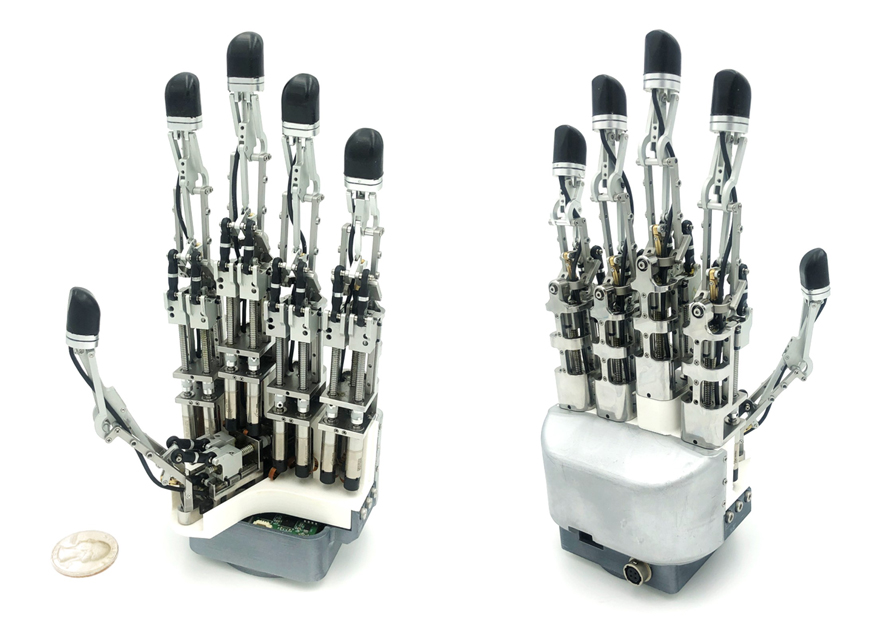
기계공학과 연구자가 강력한 악력을 가지면서 동시에 섬세한 도구 조작도 가능한 인간형 로봇 손을 개발하는 데 성공했다. 로봇 손 구동을 위한 모든 구성요소가 자체 내장된 데다 기존의 로봇 손들로는 불가능했던 여러 작업이 가능해 앞으로 다양한 분야에 활용될 전망이다.김의겸 교수(기계공학과)는 촉각 센서와 구동기를 비롯한 모든 구성요소를 포함한 일체형(All-in-one) 인간형 로봇 손 개발에 성공했다고 밝혔다. 이번에 개발한 로봇 손은 일상 생활에 필요한 대부분의 도구를 조작할 수 있을 뿐 아니라 인간 수준의 자유로운 움직임이 가능하다.이번 연구 성과는 저명 학술지 <네이처 커뮤니케이션즈(Nature Communications, Impact Factor 14.919)> 12월15일자에 온라인 게재됐다. 논문 제목은 ‘링크 구동 기반의 모든 구성요소가 통합된 인간형 로봇 손 (Integrated Linkage-Driven Dexterous Anthropomorphic Robotic Hand)’이다. 이번 연구에는 제1저자 및 교신저자로 김의겸 아주대 교수(기계공학과)가, 공동 제1저자로 정다운 고려대 박사과정 학생이 참여했으며, 한국기계연구원(KIMM) 로봇메카트로닉스실과의 협력 연구로 진행되었다.연구팀이 개발한 로봇 손은 강력한 악력을 가지면서 동시에 섬세한 도구 조작이 가능하다. 이번에 개발한 로봇 손이 들 수 있는 무게는 18kg에 달한다. NASA가 개발한 로봇(Robonaut II hand)의 가반하중이 9kg인 것을 고려해 볼 때, 아주대 연구팀이 개발한 로봇 손의 가반하중 18kg은 매우 높은 수준이다. 이에 기존의 로봇 손들로는 불가능했던 ▲맥주 캔 찌그러뜨리기 ▲무거운 아령 들기 등을 수행할 수 있다. 더불어 섬세한 움직임과 높은 자유도를 필요로 하는 다양한 도구의 사용도 가능하다. 연구팀은 이 로봇 손을 활용해 ▲가위로 종이 자르기 ▲핀셋으로 작은 칩 옮기기 등을 시현하는 데 성공했다. 인간형 로봇 손은 로봇 말단 장치 중 가장 작업의 영역이 넓고 활용성 역시 매우 높다. 현재 개발된 로봇 말단 장치들은 특정 환경에 특화되어 개발되었기 때문에 다양한 환경에서의 사용이 매우 제한적이다. 이에 국내·외 많은 연구자들이 인간형 로봇 손에 대해 활발한 연구를 해왔다. 그러나 사람 손 수준의 자연스러운 움직임과 강한 악력, 촉각에 기반한 섬세함까지를 모두 구현해 내기에는 여러 한계가 있었다. 특히 로봇 손은 우수한 성능을 얻기 위해 촉각 센서, 구동기, 제어기 등의 구성 요소를 필요로 하며, 이는 로봇 팔뚝 형태에 추가 모듈로 포함되어야 했다. 추가 모듈은 로봇 손과 상용 로봇 팔과의 결합을 어렵게 하는 요소가 된다.김의겸 교수팀은 이러한 문제를 해결하기 위해 촉각 센서와 구동기, 제어기 등의 모든 구성 요소를 로봇 손 자체에 내장시켜 완성해 냈다. 모든 구성 요소가 일체화(All-in-one)된 형태로 높은 자유도와 강한 악력, 정밀한 제어가 모두 가능한 고성능 로봇 손을 구현해 낸 것. 이에 기존 로봇 손에 비해 더욱 다양한 환경에서 폭넓은 활용이 가능하다. 이번 연구의 핵심 기술로는 링크 기반의 새로운 메커니즘 기술과 촉각 센서의 결합 기술을 들 수 있다. 연구팀은 링크 기반의 병렬 메커니즘과 직렬 메커니즘을 조합하여 새로운 메커니즘을 개발, 이를 통해 로봇 손 손가락의 독립적인 3자유도 움직임을 구현해 냈다. 3자유도 움직임이란손가락의 가장 안쪽 관절(중수지절간관절)에서의 두 방향 움직임(앞/뒤, 좌/우)과 중간 관절(근위지절간관절)의 한 방향 움직임(앞/뒤)을 의미한다. 김의겸 교수는 “손가락 크기의 좁은 공간에서 인간 손가락과 같은 3자유도의 독립적 움직임을 구현해 내는 것은 쉽지 않은 과제”라며 “링크 기반의 새로운 메커니즘 기술을 개발함으로써 이를 해결할 수 있었고 덕분에 기존 상용 로봇 팔과의 결합이 용이했다”고 설명했다.연구팀은 또한 로봇 손가락 끝에 민감도가 높은 6축 힘토크 센서를 내장, 손가락 끝에서 섬세하게 힘의 크기와 방향, 위치를 모두 측정할 수 있게 했다. 이 촉각 센서를 로봇 손에 내장하기 위해 연구팀은 결합 형태, 배선, 통신, 측정 보드를 고려하였고 컴팩트하게 결합할 수 있었다.김의겸 교수는 “이번에 개발한 고성능 로봇 손은 로봇 그리퍼나 의수를 비롯해 여러 분야에서 쓰일 수 있다”라며 “로봇 제어 연구, 딥러닝이나 강화학습 연구 등에도 적용 가능해 산업계와 우리 사회의 여러 영역에서 널리 활용되기를 기대한다”고 전했다. 이번 연구는 아주대학교 정착연구비 지원과 한국기계연구원 창의도전형 과제 지원으로 수행되었다. 이번에 개발된 로봇 손의 가반하중(물체를 들 수 있는 힘)은 18kg이다. 손가락 끝단에서 낼 수 있는 힘은 34N이고, 높은 자유도(15DOF), 20개의 관절 수, 1.1kg의 가벼운 무게, 최대 길이 218mm의 하드웨어 성능을 지닌다.
-
66
- 작성자서정원
- 작성일2022-03-17
- 8819
- 동영상동영상